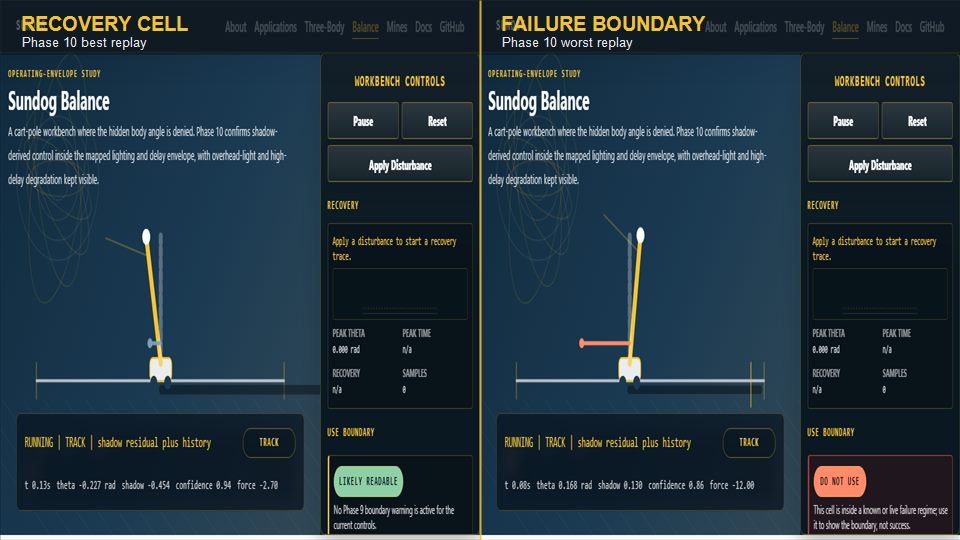
Operating envelope
Sundog Balance
Recovers inside the lighting envelope; fails cleanly at the shadow boundary.
Open workbench ->Sundog Research Lab
Halo alignment.
Explore the h(x) geometry behind solar halos, then follow the same traceability discipline into robotic control, agents, and workbenches.
Forward geometry sketch: parhelion offset is the promoted inverse handle; CZA and tangent arcs stay boundary-gated.
Elevator Pitch Restored draft · v1.1 · 2026-05-17 · audit-hedged
A sundog is an optical phenomenon beside the sun, formed when ice crystals in the atmosphere deflect light by 22° and concentrate it into a small set of geometrically determined spots, arcs, and rings. The sky doesn’t pick where these features land; their positions fall out deterministically from sun altitude and crystal orientation. Several of the halo system’s visible arcs — circumzenithal, circumhorizon, tangent — are partial traces of complete figures in the theory, with the visible portion fixed by sun–observer geometry.
A mesa neuron, by contrast, is a unit inside a trained reinforcement-learning agent’s network — in our case, one of 256 in the final hidden layer of a controller trained to track an indirect environmental signal rather than a direct reward. When we ran capacity and selection-pressure experiments on these agents, we found that mesa-optimization — the failure mode in which a learned policy develops internal optimization targets that diverge from its training signal — localizes causally to an entangled 5-dimensional subspace at that layer. In the architecture and capacity regime we tested, that subspace is not recoverable by any single neuron, any handful of features, or any linear decomposition we ran.
Here’s why the coincidence matters. In both substrates we found the same structural object: a small-dimensional, holistically-read, asymmetric-under-inversion field whose visible signatures fall out as consequences of hidden state rather than as targets in their own right. The atmosphere produces the halo system from sun altitude and ice geometry; the trained network produces basin-attractor behavior from a 5D subspace at net.7. Finding that same shape on both sides of the substrate divide is a candidate empirical hint — the geometry side of the crossover is currently under audit-driven re-derivation per the Phase 10 Attack Roadmap, and the strength of the substrate-coincidence claim is on hold until that re-audit clears — that “field-not-reward,” our claim that agents can be aligned by coupling to environmental structure rather than by optimizing a scalar objective, is describing a real category of object in the world rather than a rhetorical move.
If the geometry holds up across enough independent substrates, the implication is large: the engineering surface for alignment looks more like coupling-to-environmental-structure than like optimizing-a-scalar, and the agent, robot, and game engineering that follow from that distinction are different, more economical, and more traceable.
The moving scene above is a forward-geometry sketch, not a calibration receipt. It uses the current Phase 3 bindings where they are load-bearing: parhelion offset follows sun altitude, the CZA disappears at its coded cutoff, and tangent arcs stop at the circumscribed merge. The cards separate optics, physics, and application meaning so the picture does not overclaim.
The inner ring is the ruler. By itself it is not a hidden-state proof and it does not recover sun altitude. It fixes the scale that lets every other feature be tested against a common geometry.
The side glints are the only promoted image-recoverable inverse handle after the geometry audit. As sun altitude changes, their distance from the sun changes by the closed form. That is why the hero moves the parhelia, not the claim boundary.
The high smile is useful vocabulary, but it is not currently a promoted route for recovering altitude from public photos. The important behavior is the boundary: when the coded geometry says the CZA exits the visible regime, the hero lets it disappear.
The upper tangent arc is allowed as logo and animation vocabulary, but not as an altitude inverse. The current model is single-cell calibrated and guarded at the 29 degree merge, so the animation treats disappearance as part of the physics.
This is the structural-failure lesson: a trustworthy indirect route should fail where the closed form becomes ill-posed. The hero therefore shows the limits as behavior, not as a footnote.
The atmospheric sketch is not the whole lab. It is the visual grammar for the apparatus: separate hidden state, indirect trace, transformation, action, and the place where the coupling stops working. The photometric result and the operating-envelope workbenches carry that discipline into control systems.
Evidence lives here. Four load-bearing pillars keep the public claim inspectable — the first equation, a structural falsifier, a mesa operating envelope, and a proof-trunk status gate — and beneath them, two core photometric result metrics anchor the original mirror-alignment finding. They are supports for the apparatus, not a universal theorem claim.
Parhelion offset gives sun altitude through the promoted inverse — with the eligibility boundary visible.
Pre-registered five-locus falsifier. Click any node to open its phase document. P0/P1 passed; Cut 2 separability held; Cut 3 still open.
In-vitro operating envelope: 22 audited policy cells, sharp cliff at λ ≈ 0.953. Click a region of the axis to jump into its phase. A Phase 7 v2/v3 sibling extends the map to Large; the Large subset is still bounded.
Click any cell to open its phase document. Phases 0–3 closed positive; Phase 4 open at the Bayesian-floor gate; Phase 5 locked (no public doc); Phase 6 staged.
No terminal-intensity difference detected at n=30 between photometric and the privileged-target oracles.
Indirect feedback costs roughly 16× slower acquisition than the privileged-target oracle; random control never converges.
Application Rail
Application previews live here; evidence weight lives in the ledger above. Each card points to a working surface, product expression, or bounded workbench with its own tier and inspection path.
Recovers inside the lighting envelope; fails cleanly at the shadow boundary.
Open workbench ->Guarded local signals survive the near-escape pocket, not the whole cosmos.
Open workbench ->No target coordinates; just detector response, motion, and a closed loop.
Read result ->A noisy pressure field buys more safe progress before failure inside a narrow mapped pocket.
Open workbench ->Roguelike agents acting from compressed perception instead of full sight.
View case ->NPC motion pulled by verbs and needs, not just shortest-path errands.
View case ->Softbody terrain reads through graph signatures, recovery, and strain.
View case ->The 2016 polynomial-method precedent for OpenAI's 2026 unit-distance disproof, hands-on.
Open workbench ->See every working system, with its evidence tier →